导航的必要性
导航作为一种自然存在的行为,在古代通过人们的记忆和标识来进行,但这种方式极度依赖个人经验。为了减少这种依赖并提高效率,人类开始绘制地图,但这仍然存在诸如准确性低、规划困难、更新缓慢、存储性差等问题。随着科技的发展,现代卫星导航系统结合其他导航技术(如惯性导航和无线电导航),有效地解决了这些难题。
什么是GNSS
GNSS全称为Global Navigation Satellite System,全球导航卫星系统。其核心的服务为PNT(Positioning, Navigation and Timing),即提供定位、导航和授时服务。除了这些基本服务之外,部署增强系统还可以提供更加复杂的服务。
主流的全球性导航卫星系统有:
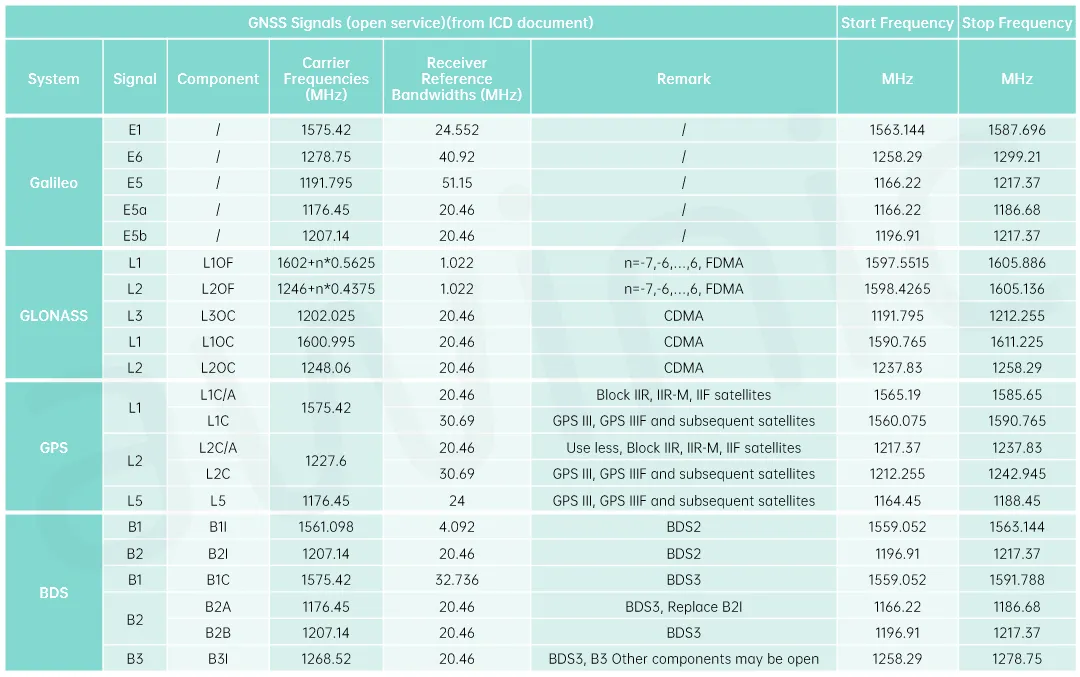
美国的全球定位系统(Global Positioning System,GPS)俄罗斯的全球导航卫星系统(Global Navigation Satellite System,GLONASS)欧洲的伽利略系统(Galileo Satellite Navigation System,Galileo)
中国的北斗卫星导航系统(Beidou Navigation Satellite System,BDS)
GNSS的工作原理
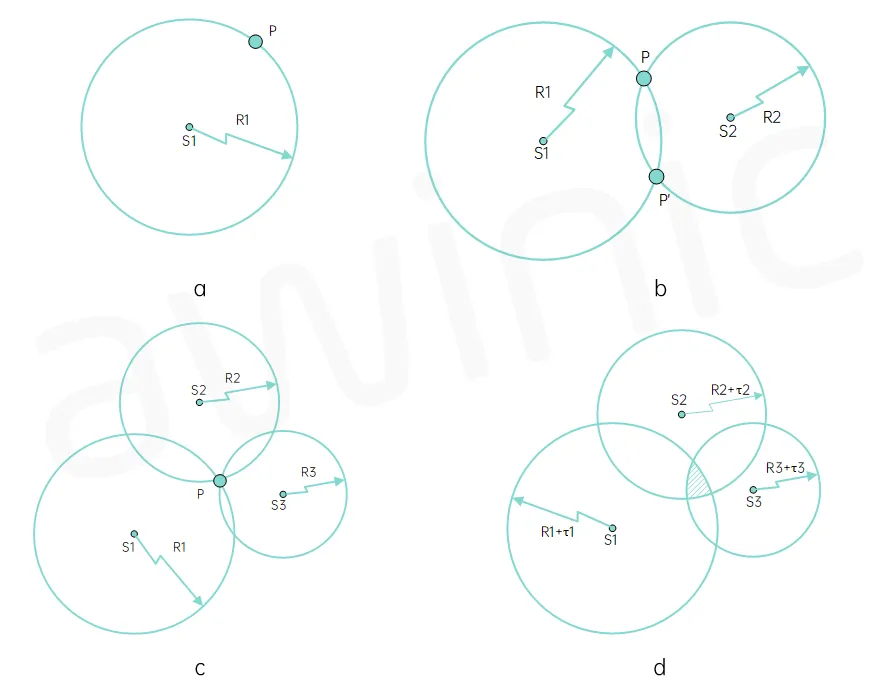
GNSS基于三角测量的原理,通过时间计算距离,即到达时间(TOA,Time of Arrival)来实现位置的确定。
图1.a所示,如果只有一个信号源,定位点P是无法被唯一确定的。
图1.b中有两个信号源发射信号,定位P点和P’都是可能的定位点,此时需要其他的补充手段(如仰角)来确定准确的定位点。
图1.c使用三个信号源发射信号,当三个信源都达到P点的探测半径,P点将被唯一确定,但实际上,公共时钟同步是有误差的,路径衰落也影响探测半径的计算。此时就会出现图1.d的情况,只能模糊地知道P在阴影范围内。误差校正是一门严谨的学问,发展至今已经可以把定位误差缩小至人们可以接受的范围内。
但是由于各种原因,定位服务远远达不到人们所需要的精度,并且定位时间也不理想。现有两种主流的技术用来优化精度和时间:
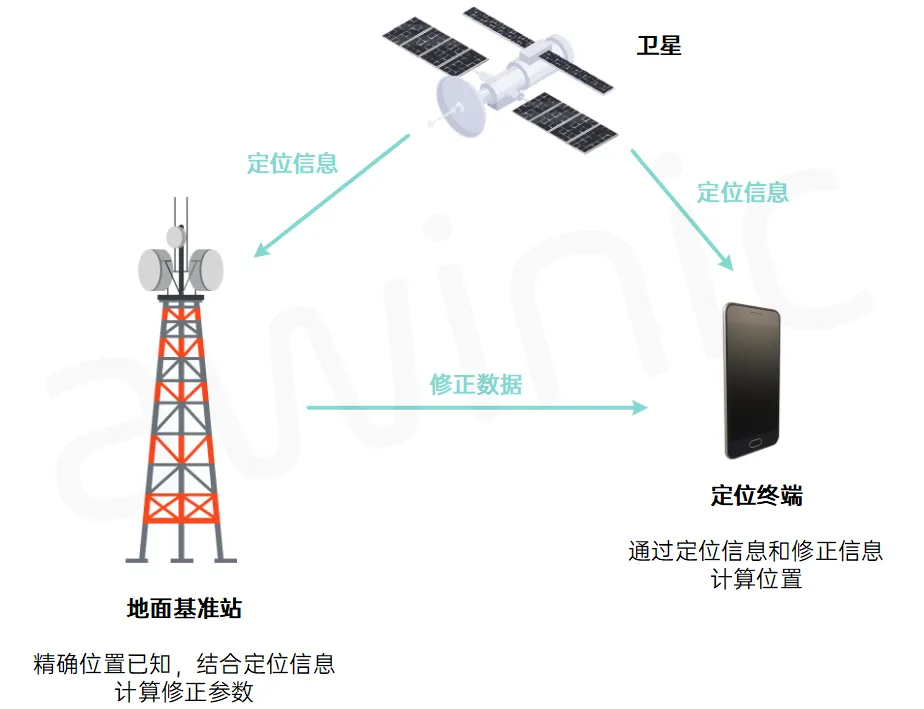
D-GNSS即差分GNSS优化精度,在地面建立基准站接收卫星信号,通过计算为用户终端提供修正数据,差分方式中有位置差分、伪距差分和载波相位差分,其中载波相位差分(RTK,Real Time Kinematic)已经可以将精度做到cm级。A-GNSS即辅助GNSS优化时间,借助移动通信基站向用户终端提供辅助信息,可将首次定位时间缩小到独立定位的十倍以上。
GNSS的应用
自GPS用于战略部署以来,GNSS的应用面越来越宽。全球范围内,GNSS相关产业的总量逐年高速增长,其中两大市场就是定位和导航。由于新能源汽车引领的智能辅助驾驶迅速发展,更显得GNSS的重要性。个人终端设备也是百花齐放,比如手机、手表等。
国家产业也遍布GNSS服务。电力传输的故障定位、CDMA通信的时钟校准、地质研究、水利布局等等,这些产业的发展极大地造福了人类。
GNSS接收机原理
GNSS接收机结构会随着设备和应用的不同而改变。可以简单地归纳成信号接收、信号处理和数据计算。
信号接收:模拟信号的筛选。卫星信号来自遥远上空,通常受到多径效应等影响而衰减。所以,接收机需要做预处理以获得频谱干净、功率适当的有用信号。信号处理:卫星信号的数字化。通过对模拟域的解调、解算等处理得到卫星信号中携带的导航数据,初步获得位置和时间等信息。数据计算:位置和时间的精确处理。接收机算法部分会依据多颗卫星多个频段播发的导航数据给出较为精确位置和时间等信息,同时还会将D-GNSS或A-GNSS提供的修正信息一同计算来优化解算结果和时间。
目前手机终端已经大量使用双频接收机结构,双频主要指L1和L5。双频接收机的最大优点为——消除电离层误差。不同频率的电磁波经过相同的介质时将会呈现不同的折射率,产生固定的时间差有助于修正电离层误差。现在的手机终端已经可以实现空旷位置1m~3m这样的定位精度。具备RTK技术的测量型接收机,双频定位精度最高可达毫米级。
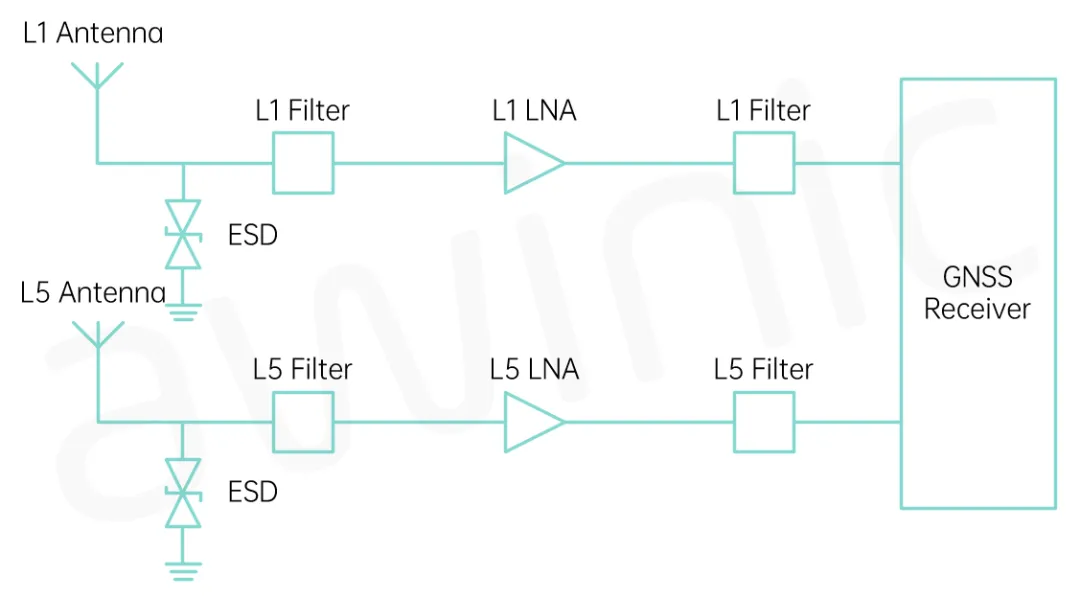
上图为手机的双频接收电路框图。手机上的接收机结构一般都是超外差式,包括接收天线、ESD二极管、前/后滤波器,低噪声放大器和GNSS接收芯片。不过,由于手机的集成度很高,信号处理和数据计算均集成到芯片中直接处理。外置的器件中,GNSS LNA对接收机性能影响较大。
艾为电子在L1、L2和L5频段均有相应产品,完善匹配市场主流封装1510、1109和1107。下表列出了艾为电子不同封装下的GNSS LNA代表性产品和主要参数。

