
 开源社区
开源社区
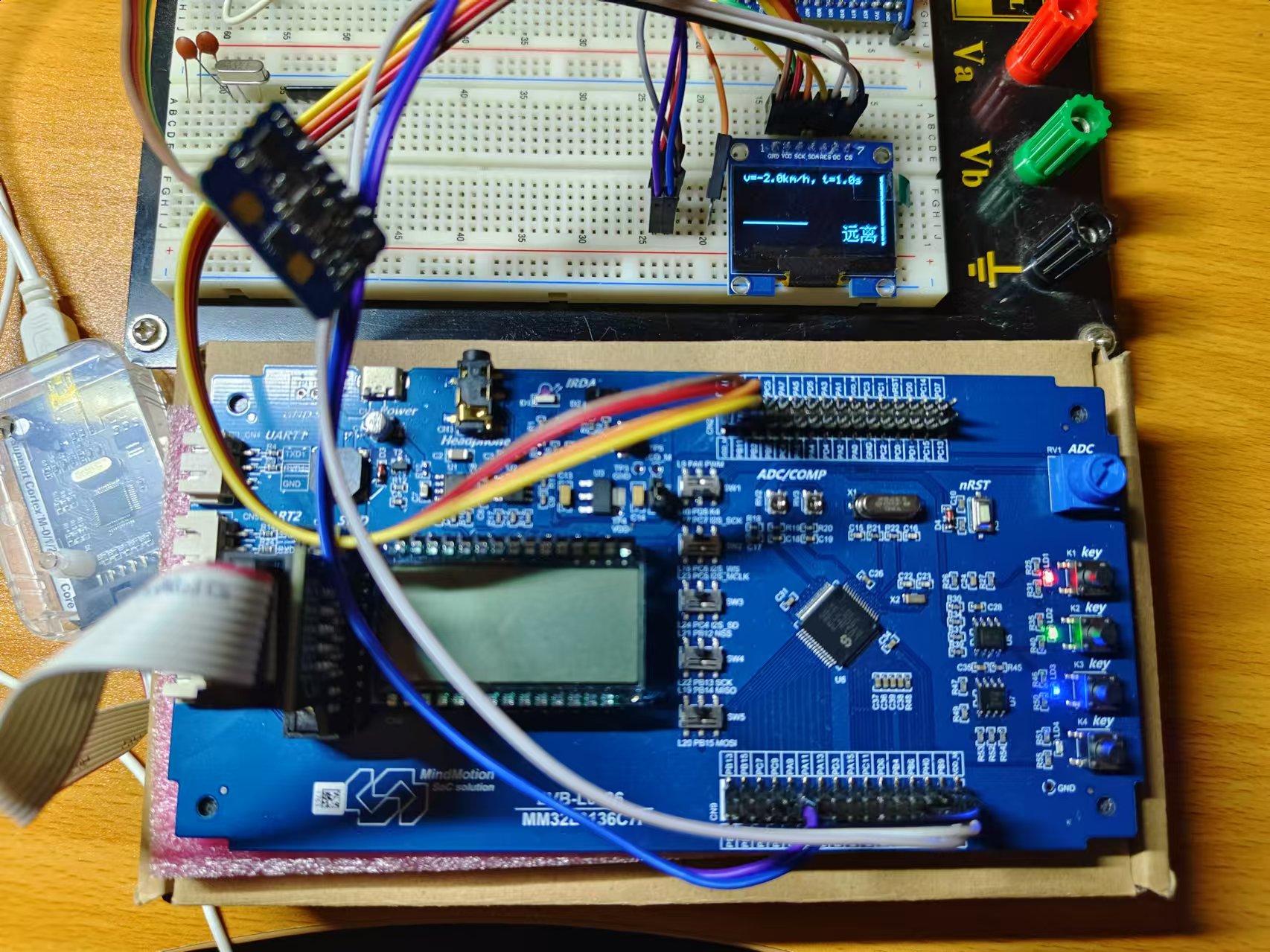
串口接收 CEM5826-M11 毫米波雷达数据,在 OLED 屏幕上绘制速度折线图并根据速度数据判断人体靠近或远离状态
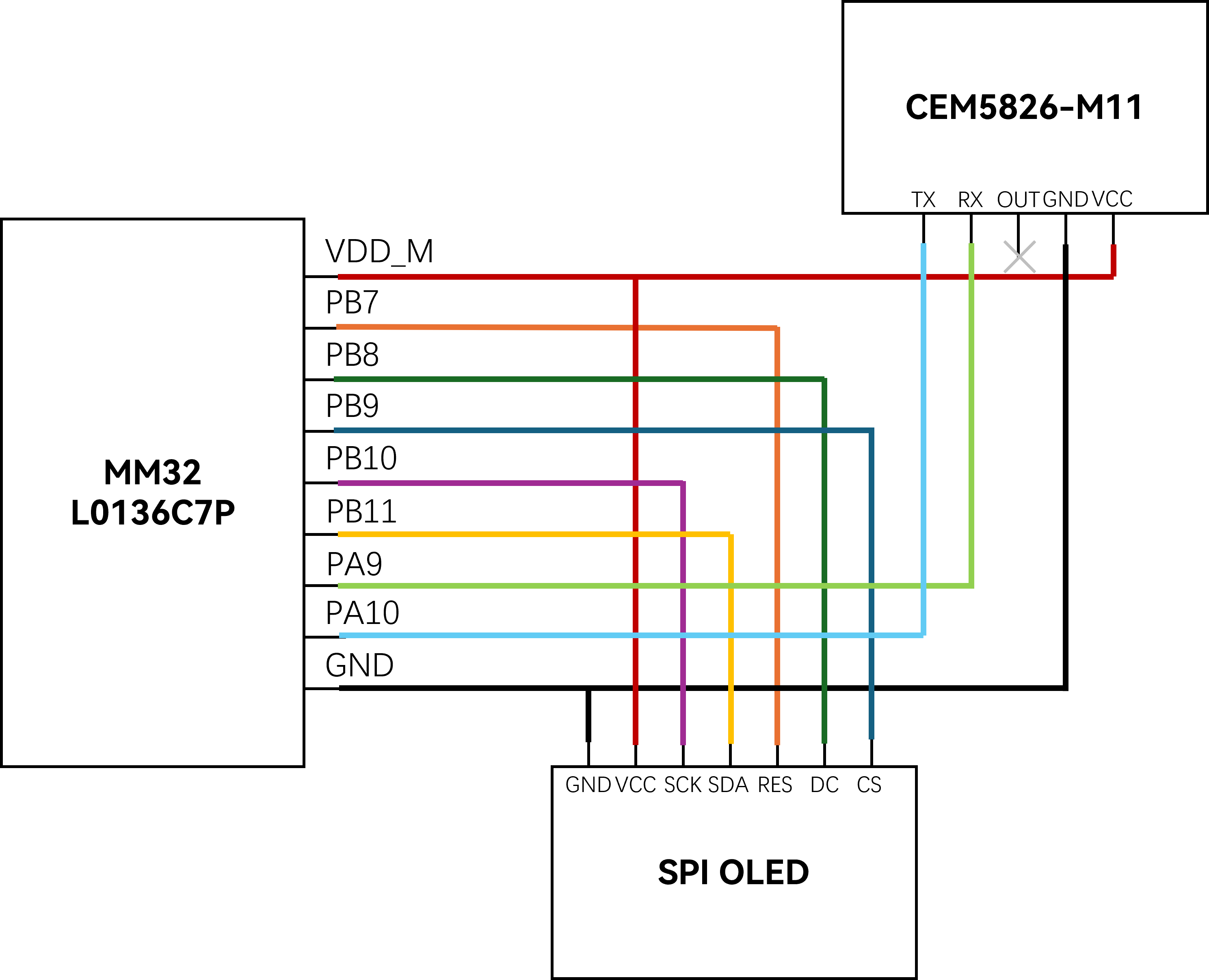
接线图
开发环境配置
开发环境配置方法可参考《MM32:配置开发环境和点亮第一颗LED》
程序编写
本项目自 STM32 项目移植而来
串口接收程序 usart.c
需要特别注意的:MM32中串口相关均为UART,这与STM32的USART不同!
void uart_init(u32 bound)
初始化串口1
void uart_init(u32 bound){
// 初始化结构体
GPIO_InitTypeDef GPIO_InitStructure;
UART_InitTypeDef UART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
// 启用串口1的RCC时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_UART1, ENABLE);
// 初始化串口
// 按照CEM5826的文档设置串口:波特率115200,8位数据位,1位停止位,校验位和流控为None
UART_StructInit(&UART_InitStructure);
UART_InitStructure.BaudRate = bound;
UART_InitStructure.WordLength = UART_WordLength_8b;
UART_InitStructure.StopBits = UART_StopBits_1;
UART_InitStructure.Parity = UART_Parity_No;
UART_InitStructure.HWFlowControl = UART_HWFlowControl_None;
UART_InitStructure.Mode = UART_Mode_Rx | UART_Mode_Tx;
UART_Init(UART1, &UART_InitStructure);
// 启用GPIOA的RCC时钟
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_1);
//UART1_TX PA9
GPIO_StructInit(&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_High;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//UART1_RX PA10
GPIO_StructInit(&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 抢占优先级
NVIC_InitStructure.NVIC_IRQChannel = UART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPriority = 0x01;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
UART_ITConfig(UART1, UART_IT_RX, ENABLE);
UART_Cmd(UART1, ENABLE);
}void UART1_IRQHandler(void)
接收数据,将数据缓存在 USART_RX_BUF 中
void UART1_IRQHandler(void)
{
u8 Res;
if(UART_GetITStatus(UART1, UART_IT_RX) != RESET)
{
Res = UART_ReceiveData(UART1);
if((USART_RX_STA & 0x8000) == 0)
{
if(USART_RX_STA & 0x4000)
{
if(Res != 0x0a) USART_RX_STA = 0;
else USART_RX_STA |= 0x8000;
}
else
{
if(Res == 0x0d) USART_RX_STA |= 0x4000;
else
{
USART_RX_BUF[USART_RX_STA & 0X3FFF] = Res ;
USART_RX_STA++;
if(USART_RX_STA > (USART_REC_LEN - 1)) USART_RX_STA = 0;
}
}
}
}
}SPI OLED 库 oled.c
void OLED_Init(void)
OLED 初始化
void OLED_Init(void)
{
// 初始化结构体
GPIO_InitTypeDef GPIO_InitStructure;
// 启用RCC时钟
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOB, ENABLE);
// 启用GPIO口,推挽输出模式、高速
// PB10 ---- SCL
// PB11 ---- SDA
// PB7 ---- RES
// PB8 ---- DC
// PB9 ---- CS
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10|GPIO_Pin_11|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_High;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_10|GPIO_Pin_11|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9);
// ...
// OLED 初始化命令
// ...
}主程序 main.c
void main(void)
int main(void)
{
// 初始化
int i = 0, j = 0, str;
float v, vData[20];
char temp[USART_REC_LEN], showStr[20];
delay_init();
uart_init(115200);
OLED_Init();
OLED_Coloiurn(0); // 关闭反色显示(0-正常, 1-反色)
OLED_DisplayTurn(0); // 关闭翻转显示(0-正常, 1-翻转)
// 显示 iCEasy LOGO
OLED_ShowPicture(0, 0, 128, 64, BMP1, 1);
OLED_Refresh();
delay_ms(500);
OLED_Clear();
while(1)
{
// 将串口收到的数据缓存到 temp
if(USART_RX_STA != 0)
{
for(i = 0; i < USART_REC_LEN; i++)
temp[i] = USART_RX_BUF[i];
}
// 从收到的数据中提取速度和强度
sscanf(temp, "v=%f km/h, str=%d", &v, &str);
// 将速度存入数组
vData[j] = v;
// 画图
if(j > 0)
OLED_DrawLine((j - 1) * 6, 40 - (vData[j - 1]*5) / 2, j * 6, 40 - (vData[j]*5) / 2, 1);
// 在 OLED 上显示字符串
sprintf(showStr, "v=%.1fkm/h, t=%.1fs ", vData[j], 0.1*j);
OLED_ShowString(2, 0, showStr, 8, 1);
// 判断远离或靠近
if(v > 0)
{
OLED_ShowChinese(92,46,0,16,1);
OLED_ShowChinese(108,46,1,16,1);
}
else
{
OLED_ShowChinese(92,46,2,16,1);
OLED_ShowChinese(108,46,3,16,1);
}
OLED_Refresh();
// 恢复继续接收串口数据
USART_RX_STA = 0;
for(i = 0; i < USART_REC_LEN; i++)
USART_RX_BUF[i] = 0;
delay_ms(100);
if(j++ == 20){ j = 0; OLED_Clear(); }
}
}一些图片

