
 开源社区
开源社区
【昉·星光2 RISC-V 单板计算机】GPS定位
本文介绍了昉·星光2单板计算机结合 GPS 模块和串口通信功能实现 GPS 定位 的项目设计。
硬件连接
| GPS module pin name | 40-pin GPIO header pin number | Details |
|---|---|---|
| VCC | 4 | 5V 电压 |
| GND | 6 | GND |
| TXD | 10 | GPIO6 (UART RX) |
| RXD | 8 | GPIO5 (UART TX) |
实物连接
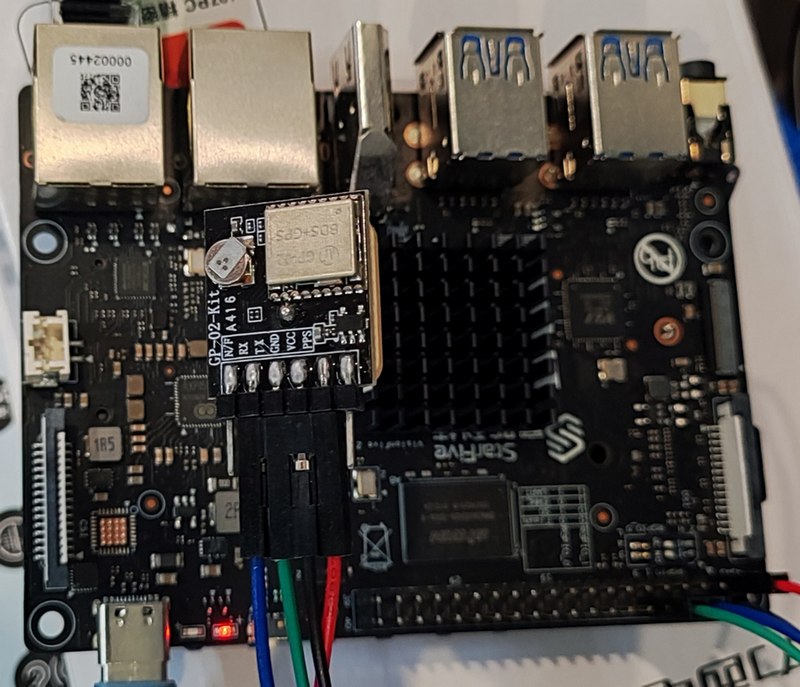
参考:使用昉·星光 2的UART读取GPS数据 .
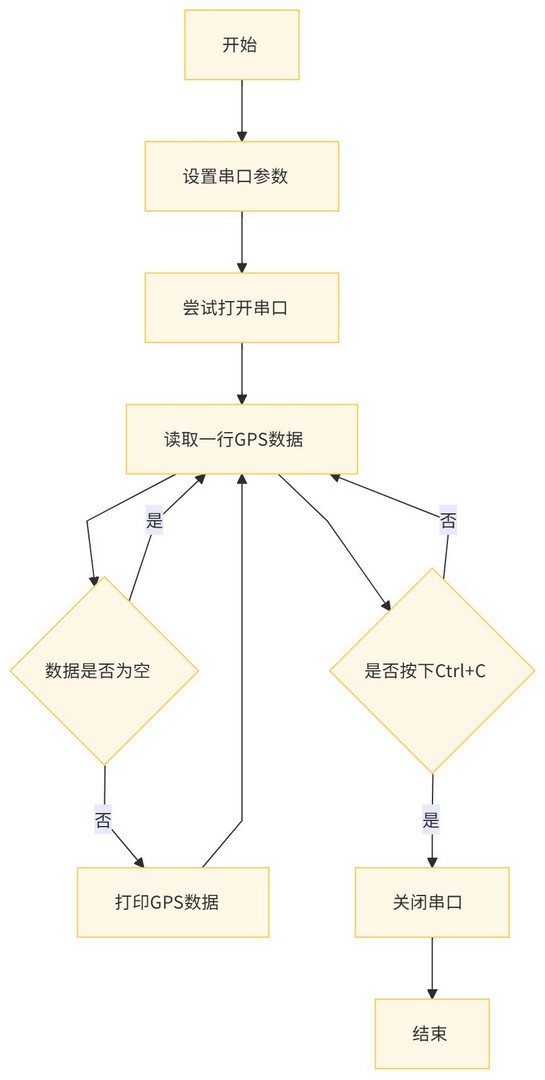
流程图
代码
import serial
# Set serial port parameters (adjust according to your GPS module)
SERIAL_PORT = "/dev/ttyS0" # It might be /dev/ttyUSB0 or others
BAUDRATE = 9600 # Common baud rate for GPS modules is 9600
def read_all_gps_data():
try:
print(f"Starting to read GPS data (Serial port: {SERIAL_PORT}, Baudrate: {BAUDRATE})...")
with serial.Serial(SERIAL_PORT, BAUDRATE, timeout=1) as ser:
while True:
line = ser.readline().decode('ascii', errors='ignore').strip()
if line: # Print only if not an empty line
print(line)
except KeyboardInterrupt:
print("\nStopping GPS data reading")
except Exception as e:
print(f"An error occurred: {e}")
if __name__ == "__main__":
read_all_gps_data()保存代码并运行
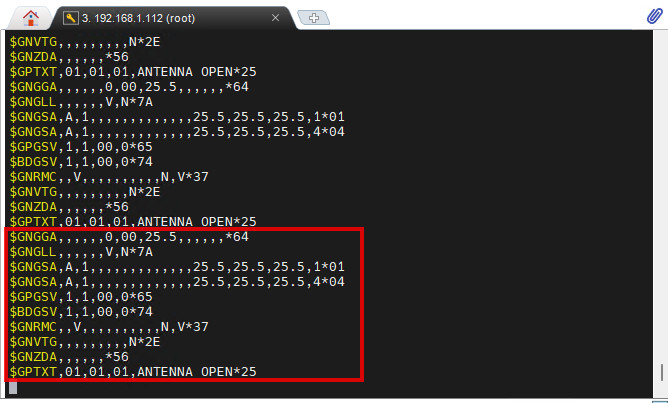
效果
打印 GPS 原始数据,包括多套卫星定位系统
解析 GPS 原始数据
安装 NMEA 解析库
apt install python3-nmea2代码
调用 pynmea2 和 serial 库函数,实现串口数据读取与时间及坐标转换,并将结果打印至终端。
import serial
import time
from pynmea2 import parse
def parse_gps_data():
try:
ser = serial.Serial("/dev/ttyS0", baudrate=9600, timeout=1)
print("Reading GPS data...")
while True:
line = ser.readline().decode('ascii', errors='ignore').strip()
if not line:
continue
try:
data = parse(line)
# Force extraction of time (return "00:00:00" if it doesn't exist)
time_utc = getattr(data, 'timestamp', "0").strftime("%H:%M:%S") if hasattr(data, 'timestamp') else "00:00:00"
# Force extraction of latitude and longitude (return 0.0 if they don't exist)
lat = getattr(data, 'latitude', 0.0)
lon = getattr(data, 'longitude', 0.0)
lat_dir = 'N' if lat >= 0 else 'S'
lon_dir = 'E' if lon >= 0 else 'W'
lat_deg = f"{abs(lat):.6f} deg {lat_dir}"
lon_deg = f"{abs(lon):.6f} deg {lon_dir}"
# Print a single set of data
print(f"Time (UTC): {time_utc}")
print(f"Latitude: {lat_deg}")
print(f"Longitude: {lon_deg}")
time.sleep(1)
except Exception as e:
continue # Silently ignore parsing errors
except KeyboardInterrupt:
print("\nStopping GPS data reading")
except Exception as e:
print(f"Serial port error: {e}")
finally:
if 'ser' in locals():
ser.close()
print("Serial port closed")
if __name__ == "__main__":
parse_gps_data()保存代码,终端执行指令 python3 gps_time_coordinate.py 运行串口数据转换程序;
效果
终端打印时间和经纬度信息,更新的时间间隔为 1 秒。

总结
本文介绍了昉·星光2单板计算机实现 GPS 定位 的项目设计,为该开发板在物联网领域的应用和快速开发提供了参考。
