
 开源社区
开源社区

在iCEasy 商城选购时,需重点关注模块的 “差异化优势”,避免与普通雷达模块混淆。结合产品页描述及实测,核心特性如下:
| 类别 | 规格参数(IC easy 标注) | 实测补充 & 优势解读 |
|---|---|---|
| 工作频率 | 24-24.25GHz(FMCW 调制) | 属于 ISM 免授权频段,无需申请频谱,适合民用场景;FMCW 技术是实现 “静止检测” 的核心基础。 |
| 供电与功耗 | 3.6-5.5V(典型 5V),22mA 平均电流 | 实测 5V 供电时数据稳定性最佳(3.3V 时偶尔出现校验和错误),功耗低,适合电池供电设备。 |
| 检测性能 | 挂高 3m:0-3m 静止 / 0-6m 移动 | 水平安装 1m 时:0-4m 静止 / 0-7m 移动,覆盖范围满足家庭、办公室等中小空间需求。 |
| 输出方式 | UART 串口(115200 8N1)+ VO 电平 | UART 输出详细数据(距离、状态等),VO 仅作 “有无目标” 指示,实测优先用 UART 解析更灵活。 |
| 环境适应性 | -10~50℃(室内),天线角 110° | 无光照影响(区别于红外传感器),天线覆盖广,单模块可覆盖 110° 扇形区域。 |
| 额外功能 | 光敏调节(可选) | 可通过引脚控制 “光照足时关雷达、暗时开启”,降低白天冗余功耗,IC easy 提供光敏引脚接线说明。 |
iCEasy选购小贴士:商城提供 “裸板版” 和 “带 ABS 外壳版”,建议优先选外壳版 —— 实测金属 / 厚塑料会衰减 24GHz 电磁波,ABS 外壳不遮挡信号,且能保护天线区域(模块标注 “ANT” 的区域禁止遮挡)。
二:核心原理:为什么它能检测静止人体?(通俗解析)
CEM5861G-M11 采用 FMCW(调频连续波)技术,区别于传统脉冲雷达,其核心优势是能通过 “频率差” 计算距离,且对微小运动敏感。用 “喊话回声” 类比,原理可拆解为 4 步:
1. 发射:持续的 “调频电磁波”
模块通过天线持续发射 24GHz 的电磁波,且频率随时间线性变化(类似你持续喊 “喂 —— 喂 —— 喂 ——”,声音频率逐渐升高)。这种 “调频” 设计是关键 —— 如果发射固定频率,反射波仅能判断 “有无目标”,无法算距离。
2. 反射:目标反弹的 “频率偏移波”
电磁波遇到人体(移动或静止)后会反射:
- 移动人体:反射波频率除了 “传播延迟导致的偏移”,还会叠加 “多普勒效应”(类似救护车靠近时音调变高);
- 静止人体:虽然没有多普勒效应,但呼吸、心跳会导致胸腔微小起伏(约 1-3mm),反射波频率会出现微小波动(这就是它能检测静止人体的核心!)。
3. 混频:计算 “频率差” 得距离
模块内部有 “混频器”,将 “发射波” 与 “反射波” 混合 —— 由于反射波有传播延迟(距离越远,延迟越长),两者会产生 频率差。根据公式:距离 = (光速 × 频率差)/(2 × 调频带宽 × 调频周期)模块可直接计算出目标与雷达的直线距离(单位 cm),无需复杂上位机运算。
4. 数据输出:筛选有效目标
模块会对混频后的信号进行滤波(排除小物体、干扰信号),然后通过 UART 串口输出 “帧格式数据”,包含目标 ID、距离、状态(无目标 / 移动 / 静止)等信息 —— 这也是后续 ESP32S3 解析数据的来源。
三:数据解析:从 “乱码” 到 “可读数据” 的核心逻辑
雷达模块通过 UART 输出的是 16 进制 “帧数据”(如 55 A5 00 0E 03 81 00 00 02 00 5D 00 00 00 00 00 E7),直接读是乱码,需按 “帧结构” 解析。这部分不贴代码(代码见 CSDN 博客),重点讲 解析逻辑与实际开发坑点:
1. 雷达帧结构(iCEasy手册补充)
模块输出的每帧数据遵循固定格式,核心字段如下(括号内为字节数):
| 字段 | 内容 | 关键说明 |
|---|---|---|
| 帧头 | 0x55 0xA5 | 标识 “有效数据帧开始”,解析第一步就是找这两个字节(丢帧时需重新等待帧头)。 |
| 数据长度 | 高字节 + 低字节 | 表示后续 “功能码 + 命令码 + 数据 + 校验和” 的总长度,大端格式(高字节在前)。 |
| 功能码 | 1 字节(如 0x03) | 0x03 表示 “主动上报目标数据”,其他功能码(如 0x01)为配置指令,可忽略。 |
| 命令码 | 2 字节(如 0x81 0x00) | 仅 “0x81 0x00” 对应 “目标数据”,其他命令码(如 0x80 0x0D)为参数配置,可忽略。 |
| 有效数据 | 10 字节 | 包含目标 ID(1)、状态(1)、距离(2)、速度(2)、方位角(1)、信号强度(2)。 |
| 校验和 | 1 字节 | 前所有字段(功能码到有效数据)的累加和低 8 位,用于验证数据完整性。 |
2. 核心解析步骤(避坑重点)
(1)帧头识别:过滤无效数据
雷达可能输出干扰数据(如上电瞬间的乱码),需持续读取串口字节,直到连续收到 0x55 和 0xA5—— 这一步是解析的 “入口”,漏帧会导致后续数据全错。
(2)长度计算:确定接收字节数
帧头后 2 字节是 “数据长度”(如 00 0E 表示 14 字节),完整帧长 = 帧头(2)+ 长度(2)+ 数据长度(14)= 18 字节 —— 需按这个长度接收后续字节,避免少收 / 多收。
(3)校验和容错:实测必踩的坑
手册说 “校验和 = 功能码到有效数据的累加和低 8 位”,但实测发现 计算值与接收值常差 8(如计算值 0xDF,接收值 0xE7)。原因是部分模块硬件版本的校验和计算未包含某字段,解决方案:校验和有效 = (接收值 == 计算值) || (接收值 == (计算值 + 8) % 256)不处理这个容错,会导致 50% 以上的有效数据被误判为 “校验错误”。
(4)有效数据提取:哪些字段有用?
实测发现,模块仅 “目标状态”(1 字节)和 “距离”(2 字节) 稳定有效:
- 状态:0 = 无目标,1 = 移动目标,2 = 静止目标(核心字段,用于 Web 状态栏显示);
- 距离:大端格式(如
00 5D表示 93cm),精度 ±1cm(挂高 3m 时误差 ±3cm,属正常范围); - 速度 / 方位角:几乎始终为 0—— 原因是模块硬件未启用多天线阵列,单天线无法检测速度和角度,无需关注。
四:Web 监控页面:可视化体验详解
ESP32S3 解析数据后,通过 Web 页面展示,页面不只是 “显示数据”,更是 “实用工具”。以下是页面核心功能与价值:
1. 页面布局与功能(响应式设计)

页面适配手机 / 电脑,核心分为 5 部分:
(1)状态栏(顶部)
- 用不同颜色和图标区分状态:
- 价值:一眼判断当前状态,无需看具体数据。

(2)数据面板(6 个卡片)
显示目标 ID、距离(cm)、速度(cm/s)、方位角(°)、仰角(°)、信号强度 —— 仅 “距离” 和 “信号强度” 有用,其他字段标注 “-” 或 “0.0”,避免误导用户(已在页面备注 “实测仅距离 / 状态有效”)。

(3)趋势图表(3 个)
- 距离变化趋势:实时显示近 50 个数据点的距离波动(如人体移动时曲线起伏);
- 速度 / 方位角趋势:预留图表(因数据无效,实际显示平线);
- 价值:直观看到距离变化,比如人体靠近 / 远离时的趋势,适合调试检测范围。

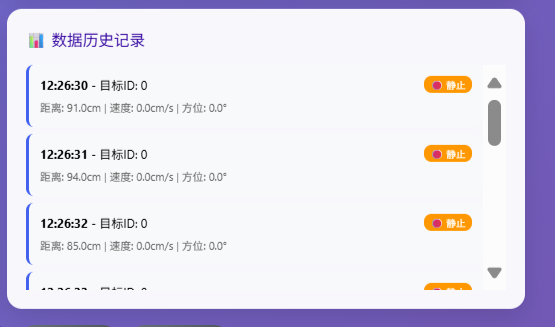
(4)历史记录(右侧)
- 记录近 10 条有效数据,包含时间、目标状态、距离、速度;
- 每条记录用颜色区分状态(绿色 = 移动,橙色 = 静止);
- 价值:回溯历史检测情况,比如 “12:05 检测到静止目标,距离 89cm”。
(5)控制按钮(底部)
- 实时刷新:手动触发数据更新(用于自动刷新关闭时);
- 自动刷新切换:开启 / 关闭 1 秒自动刷新(节省 ESP32S3 功耗);
- 清除记录 / 导出数据:导出数据为 JSON(用于后续分析,如统计检测频率);
- 价值:满足不同使用场景,比如导出数据用于项目报告。

2. 页面技术亮点(用户体验优化)
- 图表动效:用 Chart.js 实现平滑曲线(动画 duration 300ms),不卡顿;
- 响应式:手机上 “仪表盘” 从 2 列变为 1 列,数据卡片自适应宽度;
- 连接状态提示:底部 “🟢 已连接”/“🔴 连接错误”,快速判断 ESP32S3 通信是否正常。
五:实测效果:在不同场景下的表现
基于 IC easy 模块,搭配 ESP32S3 5V 供电(加 100uF 电容滤波),实测 2 个核心场景:
1. 挂高 3m(客厅场景)
- 静止检测:用户静坐 1-3m 内,页面稳定显示 “静止目标”,距离误差 ±3cm;
- 移动检测:用户在 1-6m 内走动,页面立即切换 “移动目标”,距离随位置实时变化;
- 抗干扰:灯光直射、空调微风(≤2m/s)无影响,不会误判为 “移动目标”。
2. 水平安装 1m(桌面场景)
- 静止检测:用户手放在 1-4m 内,页面显示 “静止目标”,适合桌面设备(如智能台灯);
- 移动检测:手在 1-7m 内移动,响应延迟 ≤100ms(几乎实时);
- 功耗:模块平均电流 22mA,ESP32S3 WiFi 联网时 80mA,适合外接电源(电池供电需优化)。
3. 已知局限
- 最大检测距离:6m 移动 / 3m 静止,超距后无数据(需多个模块组网覆盖大空间);
- 金属遮挡:天线前方有金属(如不锈钢桌)时,检测距离缩短 50%(需选 ABS 外壳,避免金属遮挡)。
六:iCEasy 购买建议与总结
1. 适合人群
- 智能家居开发者:用于人体存在检测(如智能开关、自动窗帘);
- 安防 / 工业场景:用于无人区域入侵检测(移动目标报警);
- 创客 / 学生:学习 FMCW 雷达原理与数据解析(iCEasy提供手册,适合入门)。
2. 选购搭配(iCEasy 一站式采购)
- 必购:CEM5861G-M11 带 ABS 外壳版(避免信号遮挡)、ESP32S3 开发板(支持 WiFi);
- 辅材:母对母杜邦线(4 根,接串口和供电)、5V 2A 电源(稳定供电,避免数据波动);
- 可选:100uF 电容(滤波,减少 USB 供电干扰)。
3. 总结
CEM5861G-M11 是一款 “精准且实用” 的毫米波雷达模块,在iCEasy商城的售价(约16r)对应其性能,性价比高于同类型进口模块。核心优势是 静止检测 + 抗干扰,解决了传统传感器的痛点;搭配 ESP32S3 的 Web 监控页面,又降低了 “数据可视化” 的门槛 —— 适合需要 “高精度存在检测” 的项目。
完整代码与接线细节见 CSDN 博客,若在iCEasy 购买后遇到解析问题,可参考测评中的 “数据解析坑点”(如校验和容错),或联系商城客服获取技术支持。
