开源社区
开源社区

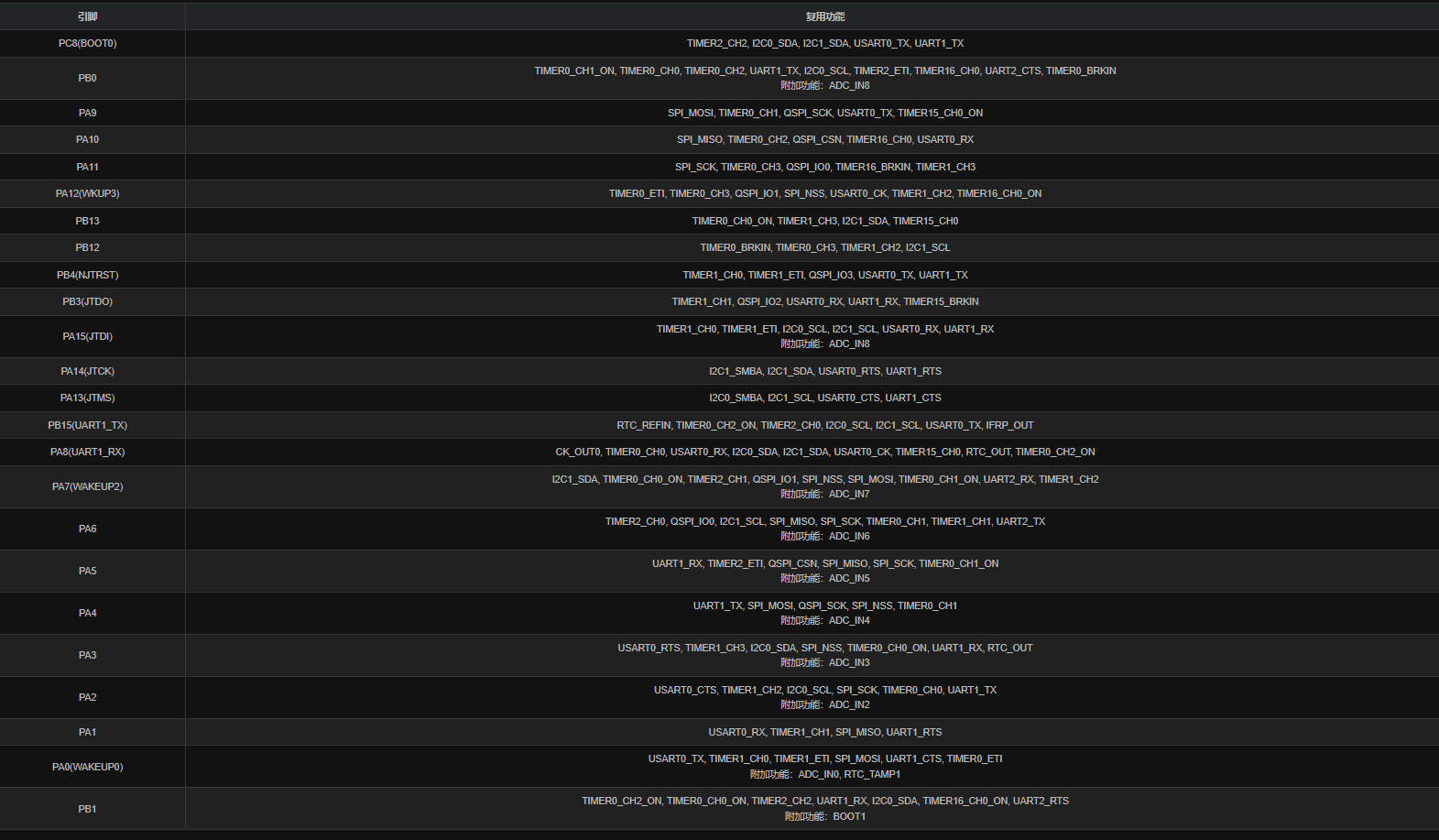
引脚定义:
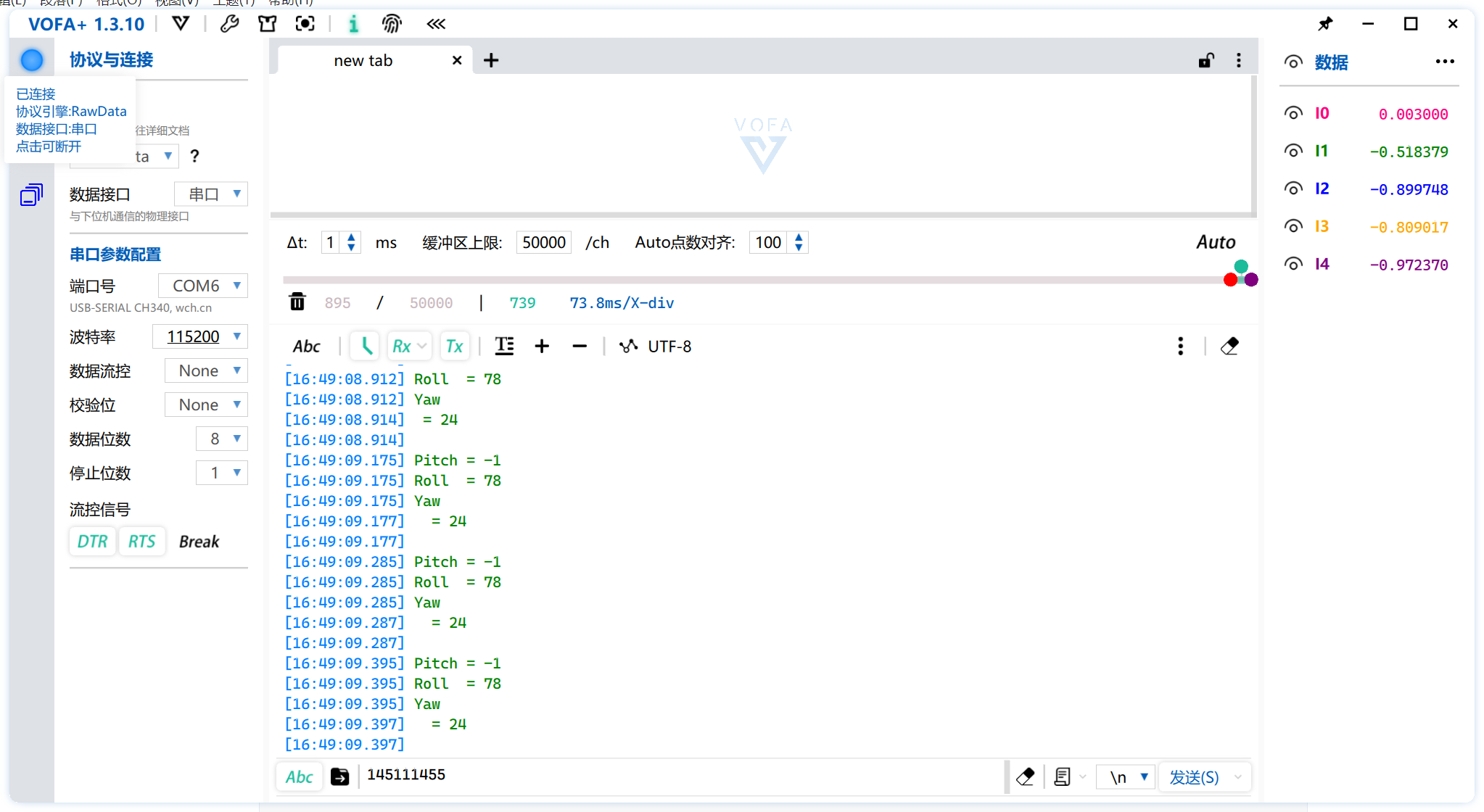
GD32VW553-IOT-V2通过MPU6050六轴传感器获取当前传感器的偏移角度
bsp_mpu6050.c
#include "bsp_mpu6050.h"
#include "stdio.h"
/******************************************************************
* 函 数 名 称:IIC_Start
* 函 数 说 明:IIC起始时序
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void IIC_Start(void)
{
SDA_OUT();
SCL(1);
SDA(0);
SDA(1);
delay_us(5);
SDA(0);
delay_us(5);
SCL(0);
}
/******************************************************************
* 函 数 名 称:IIC_Stop
* 函 数 说 明:IIC停止信号
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void IIC_Stop(void)
{
SDA_OUT();
SCL(0);
SDA(0);
SCL(1);
delay_us(5);
SDA(1);
delay_us(5);
}
/******************************************************************
* 函 数 名 称:IIC_Send_Ack
* 函 数 说 明:主机发送应答或者非应答信号
* 函 数 形 参:0发送应答 1发送非应答
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void IIC_Send_Ack(unsigned char ack)
{
SDA_OUT();
SCL(0);
SDA(0);
delay_us(5);
if(!ack) SDA(0);
else SDA(1);
SCL(1);
delay_us(5);
SCL(0);
SDA(1);
}
/******************************************************************
* 函 数 名 称:I2C_WaitAck
* 函 数 说 明:等待从机应答
* 函 数 形 参:无
* 函 数 返 回:0有应答 1超时无应答
* 作 者:LC
* 备 注:无
******************************************************************/
unsigned char I2C_WaitAck(void)
{
char ack = 0;
unsigned char ack_flag = 10;
SCL(0);
SDA(1);
SDA_IN();
SCL(1);
while( (SDA_GET()==1) && ( ack_flag ) )
{
ack_flag--;
delay_us(5);
}
if( ack_flag <= 0 )
{
IIC_Stop();
return 1;
}
else
{
SCL(0);
SDA_OUT();
}
return ack;
}
/******************************************************************
* 函 数 名 称:Send_Byte
* 函 数 说 明:写入一个字节
* 函 数 形 参:dat要写人的数据
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void Send_Byte(uint8_t dat)
{
int i = 0;
SDA_OUT();
SCL(0);//拉低时钟开始数据传输
for( i = 0; i < 8; i++ )
{
SDA( (dat & 0x80) >> 7 );
delay_us(1);
SCL(1);
delay_us(5);
SCL(0);
delay_us(5);
dat<<=1;
}
}
/******************************************************************
* 函 数 名 称:Read_Byte
* 函 数 说 明:IIC读时序
* 函 数 形 参:无
* 函 数 返 回:读到的数据
* 作 者:LC
* 备 注:无
******************************************************************/
unsigned char Read_Byte(void)
{
unsigned char i,receive=0;
SDA_IN();//SDA设置为输入
for(i=0;i<8;i++ )
{
SCL(0);
delay_us(5);
SCL(1);
delay_us(5);
receive<<=1;
if( SDA_GET() )
{
receive|=1;
}
delay_us(5);
}
SCL(0);
return receive;
}
/******************************************************************
* 函 数 名 称:MPU6050_WriteReg
* 函 数 说 明:IIC连续写入数据
* 函 数 形 参:addr器件地址 regaddr寄存器地址 num要写入的长度 regdata写入的数据地址
* 函 数 返 回:0=读取成功 其他=读取失败
* 作 者:LC
* 备 注:无
******************************************************************/
char MPU6050_WriteReg(uint8_t addr,uint8_t regaddr,uint8_t num,uint8_t *regdata)
{
uint16_t i = 0;
IIC_Start();
Send_Byte((addr<<1)|0);
if( I2C_WaitAck() == 1 ) {IIC_Stop();return 1;}
Send_Byte(regaddr);
if( I2C_WaitAck() == 1 ) {IIC_Stop();return 2;}
for(i=0;i<num;i++)
{
Send_Byte(regdata[i]);
if( I2C_WaitAck() == 1 ) {IIC_Stop();return (3+i);}
}
IIC_Stop();
return 0;
}
/******************************************************************
* 函 数 名 称:MPU6050_ReadData
* 函 数 说 明:IIC连续读取数据
* 函 数 形 参:addr器件地址 regaddr寄存器地址 num要读取的长度 Read读取到的数据要存储的地址
* 函 数 返 回:0=读取成功 其他=读取失败
* 作 者:LC
* 备 注:无
******************************************************************/
char MPU6050_ReadData(uint8_t addr, uint8_t regaddr,uint8_t num,uint8_t* Read)
{
uint8_t i;
IIC_Start();
Send_Byte((addr<<1)|0);
if( I2C_WaitAck() == 1 ) {IIC_Stop();return 1;}
Send_Byte(regaddr);
if( I2C_WaitAck() == 1 ) {IIC_Stop();return 2;}
IIC_Start();
Send_Byte((addr<<1)|1);
if( I2C_WaitAck() == 1 ) {IIC_Stop();return 3;}
for(i=0;i<(num-1);i++){
Read[i]=Read_Byte();
IIC_Send_Ack(0);
}
Read[i]=Read_Byte();
IIC_Send_Ack(1);
IIC_Stop();
return 0;
}
/******************************************************************
* 函 数 名 称:MPU_Set_Gyro_Fsr
* 函 数 说 明:设置MPU6050陀螺仪传感器满量程范围
* 函 数 形 参:fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps
* 函 数 返 回:0,设置成功 其他,设置失败
* 作 者:LC
* 备 注:无
******************************************************************/
uint8_t MPU_Set_Gyro_Fsr(uint8_t fsr)
{
return MPU6050_WriteReg(0x68,MPU_GYRO_CFG_REG,1,(uint8_t*)(fsr<<3)); //设置陀螺仪满量程范围
}
/******************************************************************
* 函 数 名 称:MPU_Set_Accel_Fsr
* 函 数 说 明:设置MPU6050加速度传感器满量程范围
* 函 数 形 参:fsr:0,±2g;1,±4g;2,±8g;3,±16g
* 函 数 返 回:0,设置成功 其他,设置失败
* 作 者:LC
* 备 注:无
******************************************************************/
uint8_t MPU_Set_Accel_Fsr(uint8_t fsr)
{
return MPU6050_WriteReg(0x68,MPU_ACCEL_CFG_REG,1,(uint8_t*)(fsr<<3)); //设置加速度传感器满量程范围
}
/******************************************************************
* 函 数 名 称:MPU_Set_LPF
* 函 数 说 明:设置MPU6050的数字低通滤波器
* 函 数 形 参:lpf:数字低通滤波频率(Hz)
* 函 数 返 回:0,设置成功 其他,设置失败
* 作 者:LC
* 备 注:无
******************************************************************/
uint8_t MPU_Set_LPF(uint16_t lpf)
{
uint8_t data=0;
if(lpf>=188)data=1;
else if(lpf>=98)data=2;
else if(lpf>=42)data=3;
else if(lpf>=20)data=4;
else if(lpf>=10)data=5;
else data=6;
return data=MPU6050_WriteReg(0x68,MPU_CFG_REG,1,&data);//设置数字低通滤波器
}
/******************************************************************
* 函 数 名 称:MPU_Set_Rate
* 函 数 说 明:设置MPU6050的采样率(假定Fs=1KHz)
* 函 数 形 参:rate:4~1000(Hz) 初始化中rate取50
* 函 数 返 回:0,设置成功 其他,设置失败
* 作 者:LC
* 备 注:无
******************************************************************/
uint8_t MPU_Set_Rate(uint16_t rate)
{
uint8_t data;
if(rate>1000)rate=1000;
if(rate<4)rate=4;
data=1000/rate-1;
data=MPU6050_WriteReg(0x68,MPU_SAMPLE_RATE_REG,1,&data); //设置数字低通滤波器
return MPU_Set_LPF(rate/2); //自动设置LPF为采样率的一半
}
/******************************************************************
* 函 数 名 称:MPU6050ReadGyro
* 函 数 说 明:读取陀螺仪数据
* 函 数 形 参:陀螺仪数据存储地址
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void MPU6050ReadGyro(short *gyroData)
{
uint8_t buf[6];
uint8_t reg = 0;
//MPU6050_GYRO_OUT = MPU6050陀螺仪数据寄存器地址
//陀螺仪数据输出寄存器总共由6个寄存器组成,
//输出X/Y/Z三个轴的陀螺仪传感器数据,高字节在前,低字节在后。
//每一个轴16位,按顺序为xyz
reg = MPU6050_ReadData(0x68,MPU6050_GYRO_OUT,6,buf);
if( reg == 0 )
{
gyroData[0] = (buf[0] << 8) | buf[1];
gyroData[1] = (buf[2] << 8) | buf[3];
gyroData[2] = (buf[4] << 8) | buf[5];
}
}
/******************************************************************
* 函 数 名 称:MPU6050ReadAcc
* 函 数 说 明:读取加速度数据
* 函 数 形 参:加速度数据存储地址
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void MPU6050ReadAcc(short *accData)
{
uint8_t buf[6];
uint8_t reg = 0;
//MPU6050_ACC_OUT = MPU6050加速度数据寄存器地址
//加速度传感器数据输出寄存器总共由6个寄存器组成,
//输出X/Y/Z三个轴的加速度传感器值,高字节在前,低字节在后。
reg = MPU6050_ReadData(0x68, MPU6050_ACC_OUT, 6, buf);
if( reg == 0)
{
accData[0] = (buf[0] << 8) | buf[1];
accData[1] = (buf[2] << 8) | buf[3];
accData[2] = (buf[4] << 8) | buf[5];
}
}
/******************************************************************
* 函 数 名 称:MPU6050_GetTemp
* 函 数 说 明:读取MPU6050上的温度
* 函 数 形 参:无
* 函 数 返 回:温度值单位为℃
* 作 者:LC
* 备 注:温度换算公式为:Temperature = 36.53 + regval/340
******************************************************************/
float MPU6050_GetTemp(void)
{
short temp3;
uint8_t buf[2];
float Temperature = 0;
MPU6050_ReadData(0x68,MPU6050_RA_TEMP_OUT_H,2,buf);
temp3= (buf[0] << 8) | buf[1];
Temperature=((double) temp3/340.0)+36.53;
return Temperature;
}
/******************************************************************
* 函 数 名 称:MPU6050ReadID
* 函 数 说 明:读取MPU6050的器件地址
* 函 数 形 参:无
* 函 数 返 回:0=检测不到MPU6050 1=能检测到MPU6050
* 作 者:LC
* 备 注:无
******************************************************************/
uint8_t MPU6050ReadID(void)
{
unsigned char Re[2] = {0};
//器件ID寄存器 = 0x75
printf("mpu=%d\r\n",MPU6050_ReadData(0x68,0X75,1,Re)); //读器件地址
if (Re[0] != 0x68)
{
printf("There is no detection of MPU6050 !!!!");
return 1;
}
else
{
printf("MPU6050 ID = %x\r\n",Re[0]);
return 0;
}
}
/******************************************************************
* 函 数 名 称:MPU6050_Init
* 函 数 说 明:MPU6050初始化
* 函 数 形 参:无
* 函 数 返 回:0成功 1没有检测到MPU6050
* 作 者:LC
* 备 注:无
******************************************************************/
char MPU6050_Init(void)
{
Module_RCU_ENABLE();
//SCL引脚初始化
gpio_mode_set(Module_SCL_PORT, GPIO_MODE_OUTPUT, GPIO_PUPD_PULLUP, Module_SCL_PIN);
gpio_output_options_set(Module_SCL_PORT, GPIO_OTYPE_OD, GPIO_OSPEED_25MHZ, Module_SCL_PIN);
//SDA引脚初始化
gpio_mode_set(Module_SDA_PORT, GPIO_MODE_OUTPUT, GPIO_PUPD_PULLUP, Module_SDA_PIN);
gpio_output_options_set(Module_SDA_PORT, GPIO_OTYPE_OD, GPIO_OSPEED_25MHZ, Module_SDA_PIN);
SCL(1);
SDA(1);
delay_ms(100); // 等待传感器稳定
//复位6050
MPU6050_WriteReg(0x68,MPU6050_RA_PWR_MGMT_1, 1,(uint8_t*)(0x80));
delay_ms(100);
//电源管理寄存器
//选择X轴陀螺作为参考PLL的时钟源,设置CLKSEL=001
MPU6050_WriteReg(0x68,MPU6050_RA_PWR_MGMT_1,1, (uint8_t*)(0x00));
MPU_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps
MPU_Set_Accel_Fsr(0); //加速度传感器,±2g
MPU_Set_Rate(50);
MPU6050_WriteReg(0x68,MPU_INT_EN_REG , 1,(uint8_t*)0x00); //关闭所有中断
MPU6050_WriteReg(0x68,MPU_USER_CTRL_REG,1,(uint8_t*)0x00); //I2C主模式关闭
MPU6050_WriteReg(0x68,MPU_FIFO_EN_REG,1,(uint8_t*)0x00); //关闭FIFO
MPU6050_WriteReg(0x68,MPU_INTBP_CFG_REG,1,(uint8_t*)0X80); //INT引脚低电平有效
if( !MPU6050ReadID() )//检查是否有6050
{
MPU6050_WriteReg(0x68,MPU6050_RA_PWR_MGMT_1, 1,(uint8_t*)0x01);//设置CLKSEL,PLL X轴为参考
MPU6050_WriteReg(0x68,MPU_PWR_MGMT2_REG, 1,(uint8_t*)0x00);//加速度与陀螺仪都工作
MPU_Set_Rate(50);
return 0;
}
// 出错
return 1;
}
bsp_mpu6050.h
#ifndef BSP_CODE_BSP_MPU6050_H_
#define BSP_CODE_BSP_MPU6050_H_
#include "gd32vw55x.h"
#include "systick.h"
#include "inv_mpu.h" // 操作MPU
#include "inv_mpu_dmp_motion_driver.h" // 操作DMP
#include "math.h"
#ifndef u8
#define u8 uint8_t
#endif
#ifndef u16
#define u16 uint16_t
#endif
#ifndef u32
#define u32 uint32_t
#endif
#ifndef delay_ms
#define delay_ms(x) delay_1ms(x)
#endif
#ifndef delay_us
#define delay_us(x) delay_1us(x)
#endif
#define Module_RCU_ENABLE() \
rcu_periph_clock_enable(Module_SCL_RCU); \
rcu_periph_clock_enable(Module_SDA_RCU);
#define Module_SCL_RCU RCU_GPIOA
#define Module_SCL_PORT GPIOA
#define Module_SCL_PIN GPIO_PIN_2 //SCL
#define Module_SDA_RCU RCU_GPIOA
#define Module_SDA_PORT GPIOA
#define Module_SDA_PIN GPIO_PIN_3 //SDA
//SDA输入模式
#define SDA_IN() \
gpio_mode_set(Module_SDA_PORT, GPIO_MODE_INPUT, GPIO_PUPD_PULLUP, Module_SDA_PIN);
//SDA输出模式
#define SDA_OUT() \
gpio_mode_set(Module_SDA_PORT, GPIO_MODE_OUTPUT, GPIO_PUPD_PULLUP, Module_SDA_PIN); \
gpio_output_options_set(Module_SDA_PORT, GPIO_OTYPE_OD, GPIO_OSPEED_25MHZ, Module_SDA_PIN);
#define SCL(BIT) gpio_bit_write(Module_SCL_PORT, Module_SCL_PIN, BIT)
#define SDA(BIT) gpio_bit_write(Module_SDA_PORT, Module_SDA_PIN, BIT)
#define SDA_GET() gpio_input_bit_get(Module_SDA_PORT, Module_SDA_PIN)
//MPU6050的AD0是IIC地址引脚,接地则IIC地址为0x68,接VCC则IIC地址为0x69
#define MPU6050_RA_SMPLRT_DIV 0x19 //陀螺仪采样率 地址
#define MPU6050_RA_CONFIG 0x1A //设置数字低通滤波器 地址
#define MPU6050_RA_GYRO_CONFIG 0x1B //陀螺仪配置寄存器
#define MPU6050_RA_ACCEL_CONFIG 0x1C //加速度传感器配置寄存器
#define MPU_INT_EN_REG 0X38 //中断使能寄存器
#define MPU_USER_CTRL_REG 0X6A //用户控制寄存器
#define MPU_FIFO_EN_REG 0X23 //FIFO使能寄存器
#define MPU_PWR_MGMT2_REG 0X6C //电源管理寄存器2
#define MPU_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器
#define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器
#define MPU_CFG_REG 0X1A //配置寄存器
#define MPU_SAMPLE_RATE_REG 0X19 //采样频率分频器
#define MPU_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器
#define MPU6050_RA_PWR_MGMT_1 0x6B
#define MPU6050_RA_PWR_MGMT_2 0x6C
#define MPU6050_WHO_AM_I 0x75
#define MPU6050_SMPLRT_DIV 0 //8000Hz
#define MPU6050_DLPF_CFG 0
#define MPU6050_GYRO_OUT 0x43 //MPU6050陀螺仪数据寄存器地址
#define MPU6050_ACC_OUT 0x3B //MPU6050加速度数据寄存器地址
#define MPU6050_RA_TEMP_OUT_H 0x41 //温度高位
#define MPU6050_RA_TEMP_OUT_L 0x42 //温度低位
#define MPU_ACCEL_XOUTH_REG 0X3B //加速度值,X轴高8位寄存器
#define MPU_ACCEL_XOUTL_REG 0X3C //加速度值,X轴低8位寄存器
#define MPU_ACCEL_YOUTH_REG 0X3D //加速度值,Y轴高8位寄存器
#define MPU_ACCEL_YOUTL_REG 0X3E //加速度值,Y轴低8位寄存器
#define MPU_ACCEL_ZOUTH_REG 0X3F //加速度值,Z轴高8位寄存器
#define MPU_ACCEL_ZOUTL_REG 0X40 //加速度值,Z轴低8位寄存器
#define MPU_TEMP_OUTH_REG 0X41 //温度值高八位寄存器
#define MPU_TEMP_OUTL_REG 0X42 //温度值低8位寄存器
#define MPU_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器
#define MPU_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器
#define MPU_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器
#define MPU_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器
#define MPU_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器
#define MPU_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器
char MPU6050_Init(void);
void MPU6050ReadGyro(short *gyroData);
void MPU6050ReadAcc(short *accData);
float MPU6050_GetTemp(void);
uint8_t MPU6050ReadID(void);
#endif /* BSP_CODE_BSP_MPU6050_H_ */
结果演示