开源社区
开源社区
CEM5881-M11 是一款基于 24GHz CW 调制的微型毫米波雷达模块,专为隐蔽式人体感应场景设计,支持串口/IO 双模式输出,可穿透非金属外壳实现运动检测与微动检测
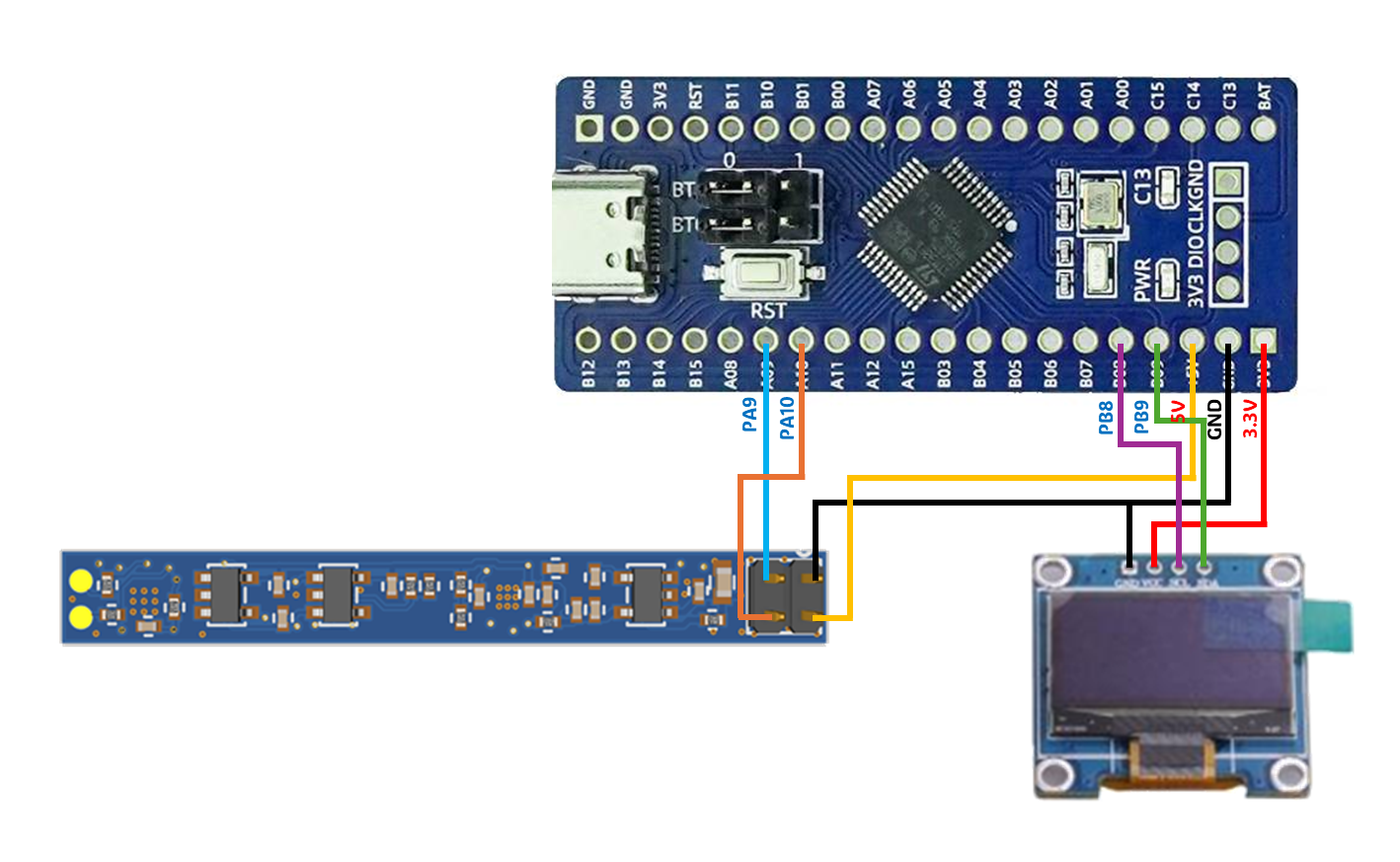
硬件连接
核心功能实现
串口数据解析
由于雷达发送的是格式化 ASCII 文本,我们使用 sscanf 函数。它像正则表达式一样,可以从复杂的字符串中精准提取数字。
- 目标格式:v=%f km/h, str=%d
- 关键点:必须识别到 \r\n (0x0D, 0x0A) 才触发解析,以确保数据帧完整。
坐标系转换逻辑
OLED 屏幕左上角为 (0,0)。为了让波形看起来自然,我们需要进行数学转换:
- 比例尺:1km/h对于的像素高度。
- 零点平移:将速度 0 的位置设在屏幕中间(y=38)。
- 公式: y_{screen} = y_{zero} - (v_{speed} \times scale)
完整代码实现
串口初始化
uint8_t RxBuffer[64];
uint8_t RxIdx = 0;
uint8_t DataReady = 0;
void USART1_Init(uint32_t baudrate) {
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);
// TX: PA9, RX: PA10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = baudrate;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); // 开启接收中断
USART_Cmd(USART1, ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}串口中断服务函数
void USART1_IRQHandler(void) {
if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) {
uint8_t res = USART_ReceiveData(USART1);
if (RxIdx < 64) {
RxBuffer[RxIdx++] = res;
if (res == 0x0A && RxIdx >= 2 && RxBuffer[RxIdx-2] == 0x0D) {
RxBuffer[RxIdx] = '\0';
DataReady = 1;
}
} else {
RxIdx = 0;
}
}
}数据处理与波形绘制
#define MAX_SAMPLES 128
float speed_history[MAX_SAMPLES] = {0};
void Process_Radar_Data(char* raw_str) {
float v;
int str_val;
char text_buf[32];
int zero_y = 38;
float scale = 5.0f;
// 解析格式:v=-0.25 km/h, str=106
if (sscanf(raw_str, "v=%f km/h, str=%d", &v, &str_val) >= 2) {
OLED_Clear(); // 清空缓冲区
// 显示文字信息
sprintf(text_buf, "V:%.2f S:%d", v, str_val);
OLED_ShowString(0, 0, (uint8_t*)text_buf, 12, 1);
// 更新历史数组
for (int i = 0; i < 127; i++) {
speed_history[i] = speed_history[i+1];
}
speed_history[127] = v;
// 绘制波形图
for (int x = 0; x < 127; x++) {
int y1 = zero_y - (int)(speed_history[x] * scale);
int y2 = zero_y - (int)(speed_history[x+1] * scale);
if(y1 < 12) y1 = 12; if(y1 > 63) y1 = 63;
if(y2 < 12) y2 = 12; if(y2 > 63) y2 = 63;
OLED_DrawLine(x, y1, x + 1, y2, 1);
}
OLED_Refresh();
}
}主函数
int main(void) {
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
SystemInit();
delay_init();
USART1_Init(115200);
OLED_Init();
OLED_Init();
OLED_ColorTurn(0);
OLED_DisplayTurn(0);
OLED_Refresh();
OLED_Clear();
OLED_ShowString(0, 0, (uint8_t*)"Waiting Data...", 12, 1);
OLED_Refresh();
while (1) {
if (DataReady) {
Process_And_Draw();
}
}
}演示