
 开源社区
开源社区

1. 串口接收雷达原始数据
1.1 硬件配置
• 串口端口:UART2
• 波特率:115200
• 数据格式:v=0.25 km/h, str=1748
1.2 初始化代码
int radar_uart_init(uint32_t uart_port, uint32_t baudrate) {
g_radar_raw_data[0] = '\0';
g_radar_temp_data[0] = '\0';
g_data_ready = 0;
g_rx_index = 0;
uart_driver_init();
uart_config(uart_port, baudrate, 0, false, false);
usart_interrupt_enable((uint32_t)uart_port, USART_INT_RBNE);
uart_irq_callback_register(uart_port, radar_uart_rx_callback);
printf("Radar UART initialized on port=%d, baud=%lu\n", uart_port, baudrate);
return 0;
}1.3 中断接收回调
static void radar_uart_rx_callback(uint32_t uart_port) {
char ch;
while (usart_flag_get((uint32_t)uart_port, USART_FLAG_RBNE) != RESET) {
ch = (char)usart_data_receive((uint32_t)uart_port);
if (ch == '\n' || ch == '\r') {
if (g_rx_index > 0) {
g_rx_buffer[g_rx_index] = '\0';
radar_publish_frame(g_rx_buffer);
g_rx_index = 0;
g_rx_buffer[0] = '\0';
}
continue;
}
if (g_rx_index < sizeof(g_rx_buffer) - 1) {
g_rx_buffer[g_rx_index++] = ch;
g_rx_buffer[g_rx_index] = '\0';
} else {
printf("RADAR_RX overflow, dropping frame\n");
g_rx_index = 0;
g_rx_buffer[0] = '\0';
}
}
}2. 数据帧解析
2.1 数据格式说明
雷达输出数据格式:
v=0.25 km/h, str=1748
• v:目标速度,单位km/h
• str:信号强度
2.2 数据结构定义
typedef struct {
float velocity; // 速度值(浮点)
int32_t velocity_x100; // 速度值放大100倍(整数)
int16_t signal_str; // 信号强度
bool valid; // 数据有效性标志
uint32_t timestamp; // 时间戳
} radar_data_t;2.3 解析函数实现
bool radar_parse_line(const char* line, radar_data_t* data) {
float velocity = 0.0f;
long signal = 0;
char* signal_end = NULL;
const char* p = line;
if ((line == NULL) || (data == NULL)) {
return false;
}
// 校验前缀 v=
if (!((*p == 'v') || (*p == 'V')) || (*(p + 1) != '=')) {
return false;
}
p += 2;
if (!parse_signed_fixed_2(p, &velocity, &p)) {
return false;
}
// 校验单位 km/h
while (*p == ' ') {
p++;
}
if (strncmp(p, "km/h", 4) != 0) {
return false;
}
p += 4;
// 跳过分隔符
while (*p == ' ' || *p == ',') {
p++;
}
// 校验 str=
if (!((p[0] == 's' || p[0] == 'S') && (p[1] == 't' || p[1] == 'T') &&
(p[2] == 'r' || p[2] == 'R') && p[3] == '=')) {
return false;
}
p += 4;
// 解析信号强度
signal = strtol(p, &signal_end, 10);
if (signal_end == p) {
return false;
}
// 保存解析结果
data->velocity = velocity;
data->velocity_x100 = (int32_t)(velocity * 100.0f);
data->signal_str = (int16_t)signal;
data->valid = true;
data->timestamp = sys_current_time_get();
return true;
}3. 数据缓存管理
3.1 双缓冲机制
采用双缓冲设计避免中断与HTTP访问冲突:
• 写入缓冲区:g_radar_temp_data(UART中断写入)
• 读取缓冲区:g_radar_raw_data(HTTP接口读取)
• 结构化数据:g_latest_radar_data
3.2 数据获取接口
void radar_get_raw_data(char* buffer, size_t buffer_size) {
if (buffer == NULL || buffer_size == 0) {
return;
}
if (g_data_ready) {
strncpy(g_radar_raw_data, g_radar_temp_data, sizeof(g_radar_raw_data) - 1);
g_radar_raw_data[sizeof(g_radar_raw_data) - 1] = '\0';
g_data_ready = 0;
}
strncpy(buffer, g_radar_raw_data, buffer_size - 1);
buffer[buffer_size - 1] = '\0';
}
bool radar_get_latest_data(radar_data_t* data) {
if (data == NULL || !g_latest_radar_data.valid) {
return false;
}
*data = g_latest_radar_data;
return true;
}4. HTTP接口设计
4.1 API接口
• URL:/api/radar
• 方法:GET
• 返回格式:JSON
4.2 接口实现
if (strncmp(buffer, "GET /api/radar", 14) == 0) {
printf("[HTTP] Processing radar API\n");
char radar_json[320];
char raw_data[256] = {0};
radar_data_t radar_data = {0};
uint8_t has_data = 0;
char velocity_text[24];
char threshold_text[24];
radar_get_raw_data(raw_data, sizeof(raw_data));
has_data = radar_get_latest_data(&radar_data) ? 1 : 0;
if (raw_data[0] == '\0') {
strncpy(raw_data, "无数据", sizeof(raw_data) - 1);
raw_data[sizeof(raw_data) - 1] = '\0';
}
format_fixed_2(velocity_text, sizeof(velocity_text), has_data ? radar_data.velocity_x100 : 0);
format_fixed_2(threshold_text, sizeof(threshold_text), threshold_to_x100(g_radar_speed_threshold));
if (g_auto_mode) {
snprintf(radar_json, sizeof(radar_json),
"{\"raw_data\":\"%s\",\"velocity\":%s,\"str\":%d,\"valid\":%s,\"led_status\":\"%s\",\"threshold\":%s,\"mode\":\"%s\"}",
raw_data,
velocity_text,
has_data ? radar_data.signal_str : 0,
has_data ? "true" : "false",
led_is_on() ? "on" : "off",
threshold_text,
get_mode_text());
} else {
snprintf(radar_json, sizeof(radar_json),
"{\"raw_data\":\"%s\",\"velocity\":%s,\"str\":%d,\"valid\":%s,\"led_status\":\"%s\",\"mode\":\"%s\"}",
raw_data,
velocity_text,
has_data ? radar_data.signal_str : 0,
has_data ? "true" : "false",
led_is_on() ? "on" : "off",
get_mode_text());
}
send_response(conn_fd, "application/json", radar_json);
close(conn_fd);
return;
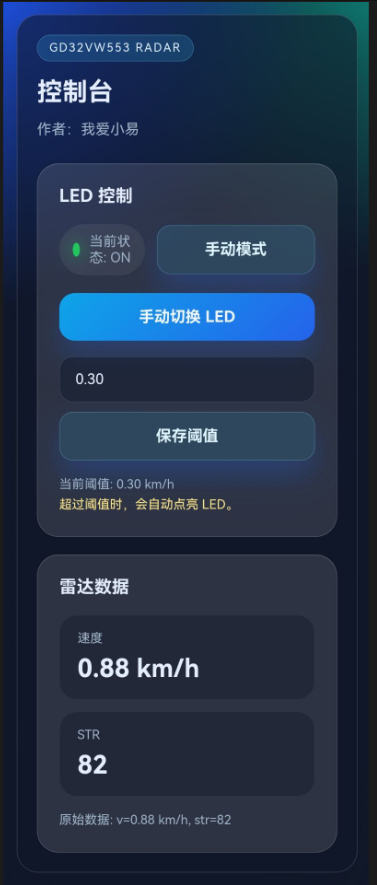
}5. 网页端显示
具体实现思路可以参考之前我写的另外一篇帖子: 帖子
6. 结果
源代码可以群里联系这里不能上传C文件
